Customized Sensor Design
1 General Information
Since the variety of possible applications for radar is huge, radar sensors need to be tuned specifically to the target application. Usually, the critical parameters are the update rate of the sensor, its resolution or the ability to separate targets, and its accuracy (of measured distance or speed). Mostly, the baseband needs to be designed specifically for the intended application and measurement principle, to match the desired parameters. Also, the signal processing software on the sensor needs to be implemented according to the needs of the application.
2 Radar Sensor Hardware
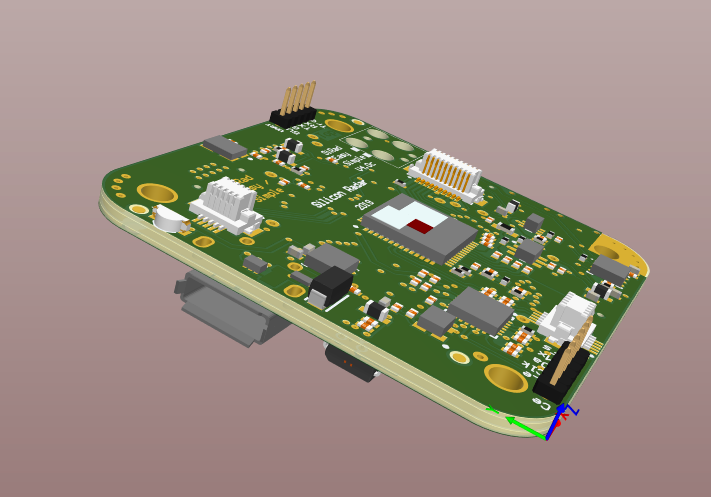
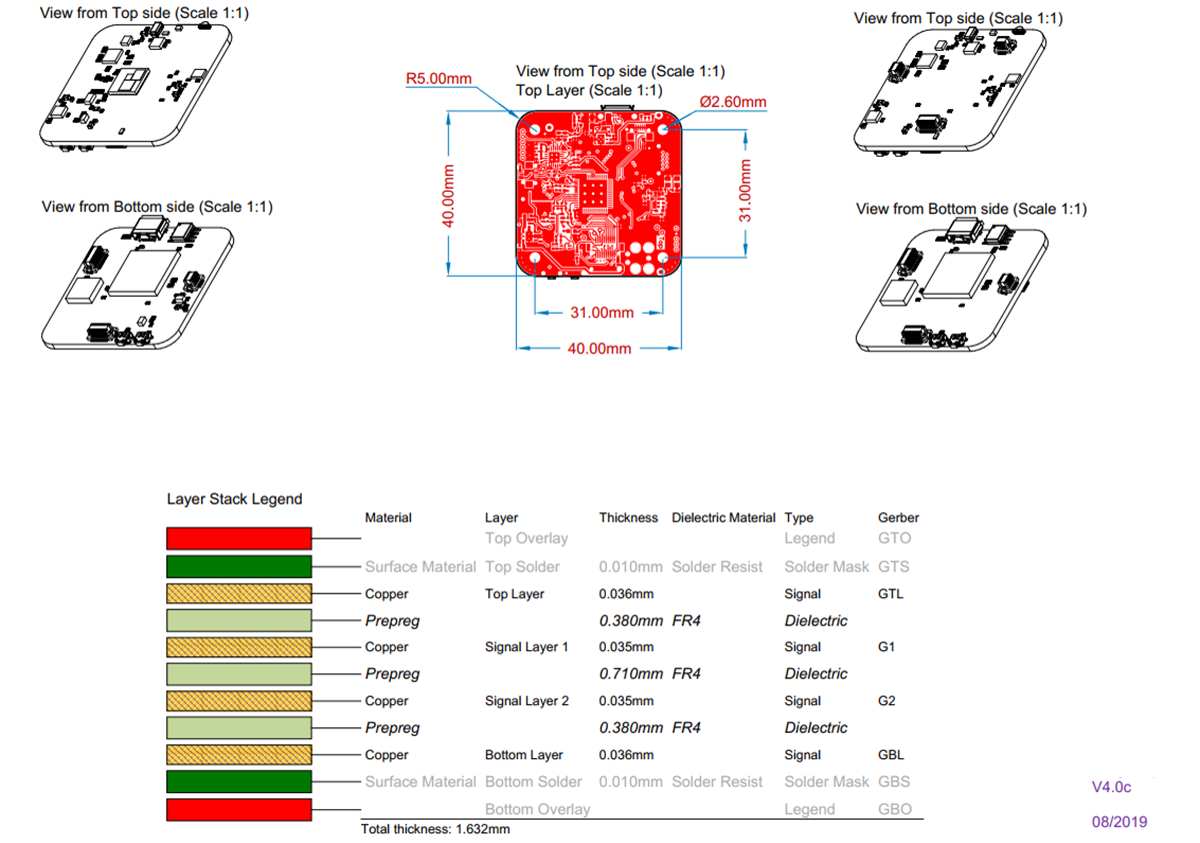
Our reference designs SiRad Easy® and SiRad Simple® can be used as a start point for sensor developments by our EvalKit customers. The schematics of the designs are available to our EvalKit customers in PDF form after closing an NDA with us. The designs include front end control, baseband, analog to digital conversion, digital signal processing option, and data interfaces (control lines, UART, WiFi). There are no HF parts in the designs even though our front ends work with very high frequencies.
3 Radar Sensor Software
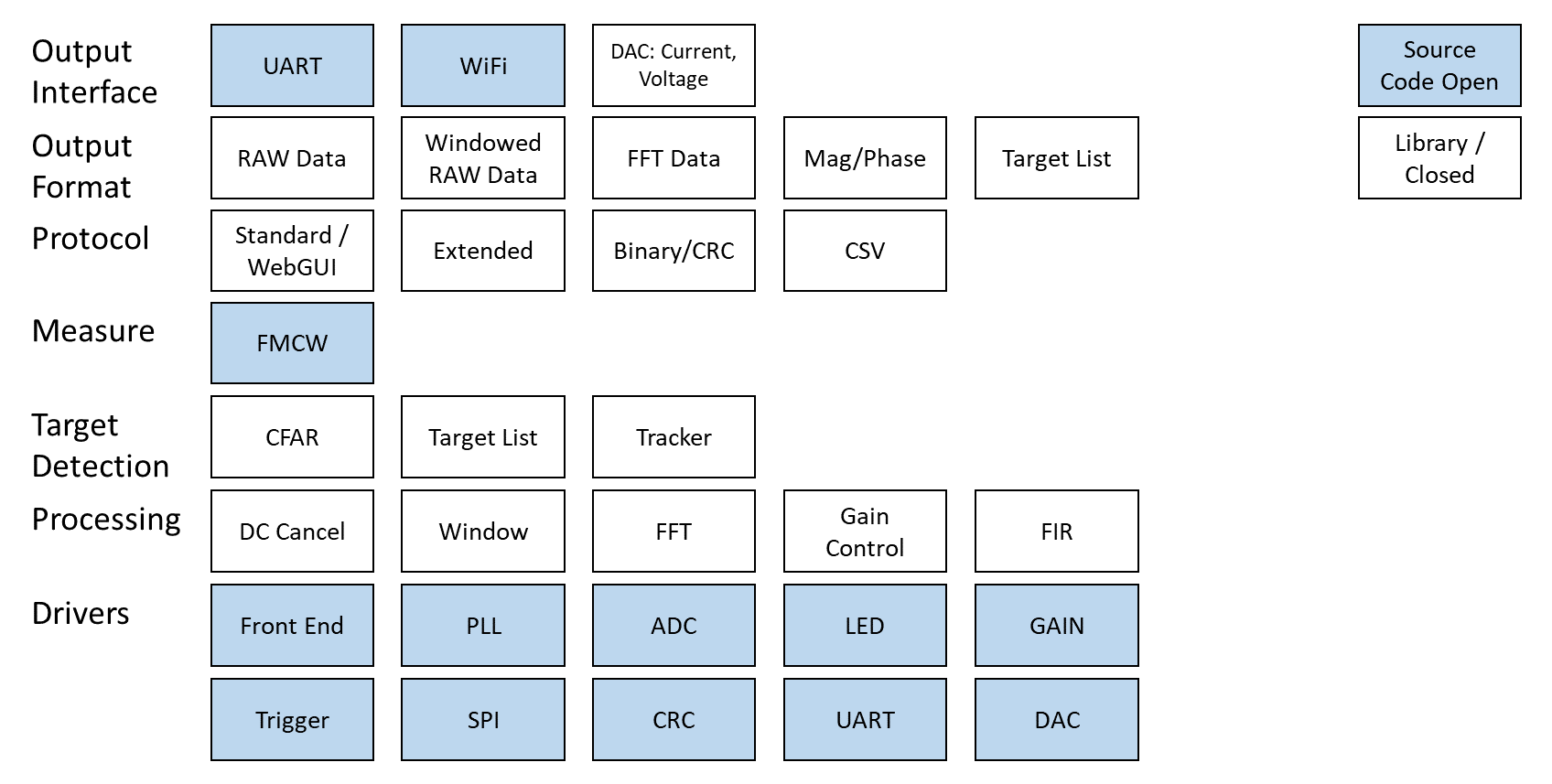
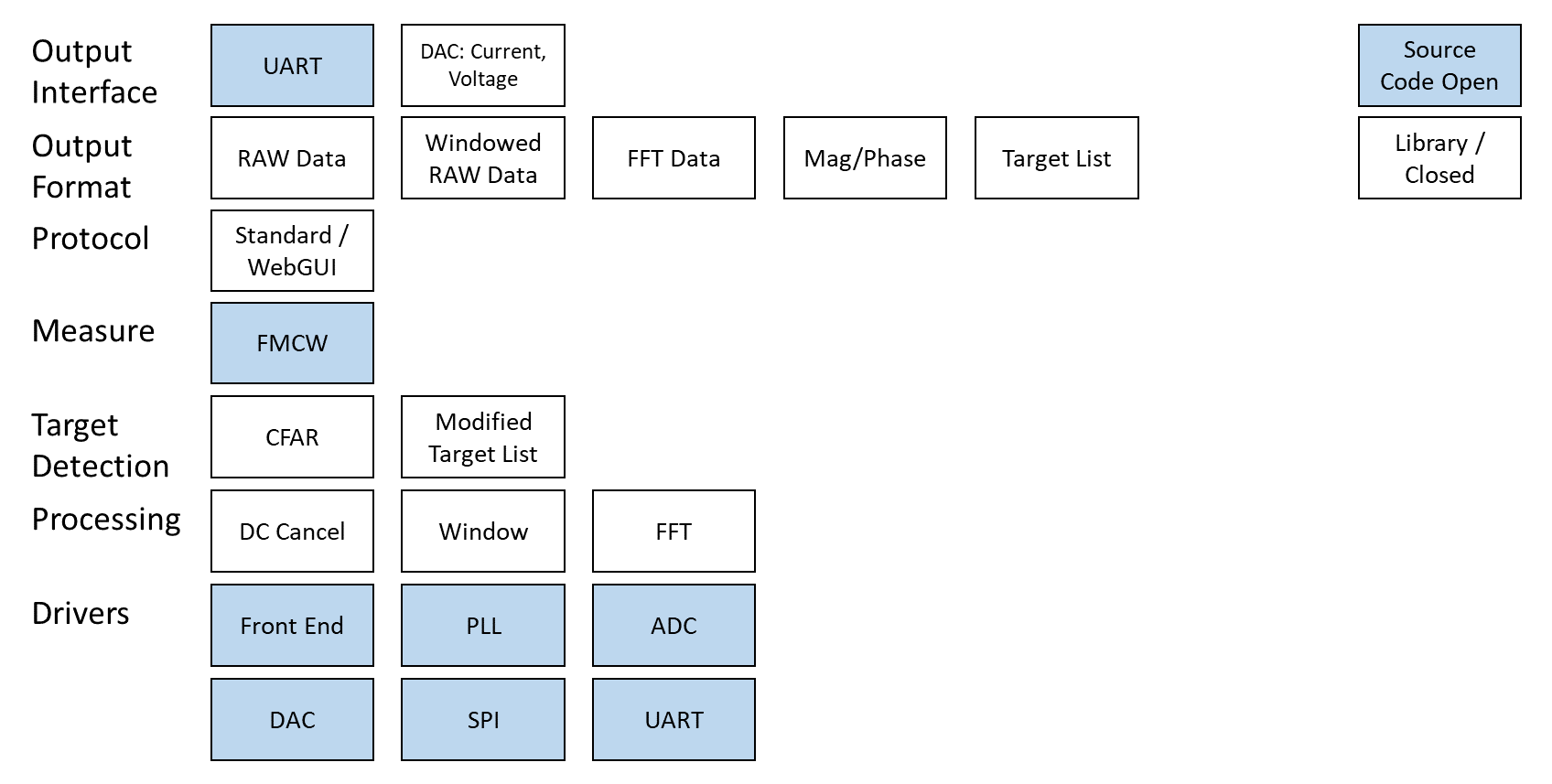
We also offer a free reference firmware implementation and signal processing library in our download area for our EvalKit customers. The firmware is written in embedded C and comes pre-flashed on our evaluation kits. The open firmware parts include drivers for front end control, baseband, PLL, and data interfaces (control lines, UART, WiFi). The library includes the signal processing functions that can be tried out with our evaluation kits. The reference firmware implementation and signal processing library can be used as a start point for sensor developments by our EvalKit customers.
{kind=link}
{kind=link}
{kind=link}
{kind=link}