Sensor Design
1 General Information
Since Radars use radio waves in the detection process, the Radar front ends are related to electronic circuits that operate with high-frequency signals. Depending on the purpose of applications, these frequencies range from hundreds of MHz up to hundreds of GHz. The design of Radar sensors involves the development of PCBs and software around building blocks such as radar front ends, amplifiers, PLL & loop filters, ADC and microcontrollers, data interfaces, and passive elements.
2 Radar Sensor Building Blocks
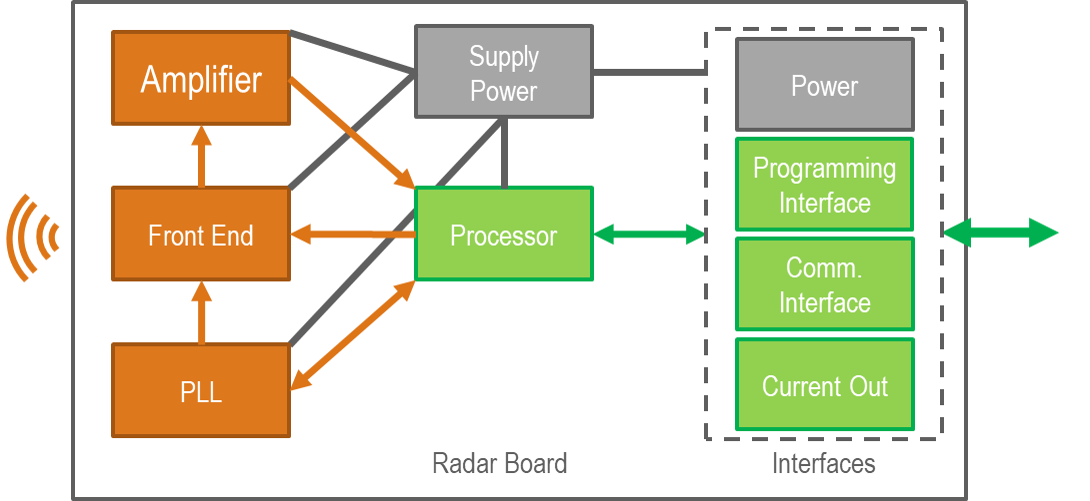
Radar sensors typically share a similar structure as shown in Figure 1. Some building blocks used in Radar sensors are described here.
Front End: The radar front end transmits and receives electromagnetic waves that reflect on objects. The reflected wave contains information about the object, for example, its speed or distance from the front end. Depending on the frequency of the electromagnetic waves, the antenna can be included with the front end, or connected externally. The front end is referred to as Radar Front End (RFE).
PLL & Loop Filter: The Phase-Looked-Loop and loop filter block controls the front end and sets its frequency into the operating range. The Phase-Looked-Loop also drives the ramp necessary to tune the front end over the chosen bandwidth. The loop filter is important for the correct operation of the front end and Phase-Looked-Loop. The Phase-Looked-Loop usually also compensates for any temperature or aging effects. The Phase-Looked-Loop and loop filter block are referred to as PLL.
Amplifier & Signal Filter: Amplifiers are used to amplify the signals coming from the radar front end. Since the signal reflected from an object and picked up by the radar front end is weaker than the signal that was initially sent out by the radar front end, the amplifier has to amplify this signal by adding as little noise as possible to the signal. This amplifier is referred to as the Base Band Amplifier (BBAmp). Further, some filtering is necessary on the signal. Filters are typically placed next to (before and after) the amplifier and referred to as Low-Pass (LP), High-Pass (HP), or Band-Pass (BP).
ADC & Microcontroller: The Analog-Digital-Converter (ADC) or microcontroller (uC) digitizes the radar signal for the following processing steps. Usually, the next processing steps include DC cancellation, windowing of the data, FFT calculation, and finally target extraction. The microcontroller also controls the different hardware parts such as RFE, PLL, and BBAmp.
Data Interfaces: Interfaces are needed to control the sensor via commands and to output data. Typical communication interfaces are GPIO pins, UART, SPI, Ethernet, and Wi-Fi.
{kind=link}